|
| |
Numerical Modelling (1997-2001)
|
Head Related Transfer Functions (HRTFs)
A
large body of research has been carried out on HRTF measurement (see Hebrank
and Wright, 1974, Mehrgardt and Mellert, 1977, Butler and Belendiuk, 1977,
Shaw and Teranishi, 1968, Shaw, 1974, Shaw, 1975, Shaw and Vaillancourt,
1985, Gardner and Martin, 1994, 1995, Møller et al, 1995, Hammershøi
and Møller, 1996, Carlile and Pralong, 1994, Pralong and Carlile,
1994 and Blauert, 1997).
The external ear transfer functions
are measured in the above publications at various places along the ear
canal, which gives rise to different responses. However, since up to 12-14
kHz only the longitudinal mode is present in the ear canal, the variation
of the position of the microphone does not distort the directionally dependent
HRTFs. |
 |
| Mesh decimation and manipulation
The initial assumption made during
this work was that the highest resolution possible is required for the
mesh models of the head and pinnae. It was not clear at that stage what
accuracy is required and how sensitive will be the modelling of the acoustical
response to geometry approximations. There are currently a few techniques
available to obtain a computer model by scanning a physical model. These
include: Computed Tomography (CT), Magnetic Resonance Imaging (MRI), 3-D
ultrasonic imaging, etc. These are generally used for internal scanning
for medical purposes. The main advantage of the 3-D laser scanner technique
used in this research is that it can produce fairly quickly an accurate
mesh of the surface made out of triangles
In the initial work, the Cyberware
'Head and Face' colour 3-D scanner had been used. This scanner includes
the 3030/RGB digitising head and the PS motion system. It is mainly used
for medical applications, anthropometry, human interface, and in the film
industry. The geometry is captured by means of an optical range-finding
system that produces around a half of a million interconnected triangles
and their vertices in approximately 15 seconds. We refer to this scanner
as having a 'low-resolution'.
To begin with, it was found in
the scanning stage, that the accuracy of the pinna, which is our most important
part of the head, was poor, since during the motion of the scanner the
laser beam detects only unhidden parts. In the initial trials using the
KEMAR head, the rear part of the pinnae were significantly distorted, and
more importantly, the resulting concha was much shallower then the original
rubber ear of KEMAR, and without the details of the cavum and cymba concha,
helix, antihelix and fossa of helix. However, only after a set of simulations,
it was found that another scanning technique was required for high accuracy
modelling of the pinna.
Although still based on the technology
of laser scanning, the Cyberware 'Mini model' 3-D scanner is based on the
high-resolution 3030RGB/HIREZ scan head with a mid-size high-resolution
motion system. It moves slowly from side to side in the horizontal plane
in a straight line, parallel to the object. The principle of operation
is similar to the 'head and face' scanner, but with software controlled,
the data is accumulated through repeated scans at different angles of the
pinna. In this way, almost every curvature can be captured correctly. Even
the ear canal geometry can be obtained, by providing an additional model
with the original's cross-section. Then, the software matches the 'internal'
data with its own 'external' data by matching overlapping sections. The
duration of this scanning procedure is much longer, of the order of a few
hours; before any post-processing is applied to fix connectivity, rough
surface, holes, etc.
A few tools were developed and
used to integrate the two scans into a single mesh model for both KEMAR
head and YK head. Two types of decimated KEMAR models are presented below.
In both cases the original data included more than 400000 triangles (around
200000 vertices). The target was to obtain a suitable BEM mesh that could
be used to modelling at the maximum frequency possible with the IBEM in-core
solver . The mesh on the right was decimated using our proposed algorithm
that produces homogeneously distributed vertices, thus optimising its size,
geometry, and maximum frequency. This resulted in approximately 23000 elements
that can be used up to 15 kHz if four elements per wavelength are assumed
(for the ipsilateral ear), and 10 kHz if six elements per wavelength are
assumed (for the contralateral ear).
When a conventional mesh decimation
algorithm was used (the mesh in the middle, optimised for computer graphics
applications), and the number of elements was limited to 23000 elements,
a mesh with non-uniform distribution of vertices was obtained, where planar
areas were described with less triangles, and complex areas retained a
higher density of triangles to preserve the geometry. Note that with both
decimation algorithms the rendered image (on the left) is very similar.
This mesh in the middle could be investigated using the BEM reliably only
up to 1 kHz (!). This emphasises the significance of optimising the mesh
distribution while retaining the accuracy of complex shapes such as the
pinna. |
|
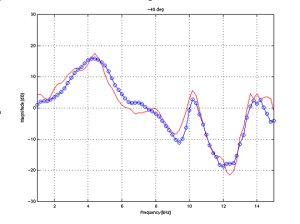
BEM simulation and measurement comparison
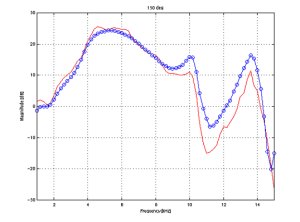
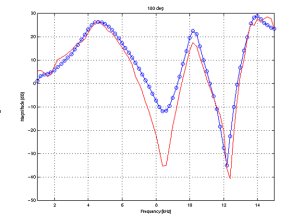
The following figures demonstrate
the accuracy of the simulation results when compared to measurements at
various angles in the horizontal plane.
The same simulated and measured
responses are shown at discrete angles. These show that errors of <1
dB appear up to 15 kHz. At other angles where sharper notches are found
errors increase locally at the position of the notch. It should be noted
that median plane simulation and measurement do not impose great difficulty
from the SNR point of view, since there are no effects of the shadowing
due to the head, which have strong attenuation at high frequencies. |
|
-40 deg.
|
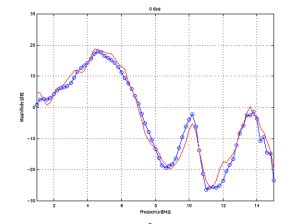
0 deg.
|
|
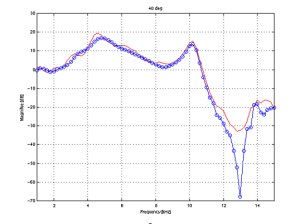
40 deg.
|
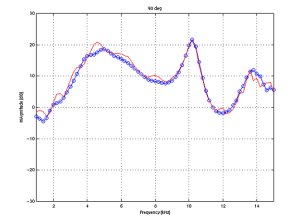
90 deg.
|
|
130 deg.
|
180 deg.
|
Up |